Hello there! I am Esteban Segarra Martinez, a PhD Graduate in Computer Science with a focus on Robot Vision, Simulateneous Localization and Mapping(SLAM), and tooling for evaluating SLAM, Virtual Reality (VR), and fixing point clouds!
This portfolio website is a showcase of my work, projects, and achievements in the field of computer science and robotics. It features a modern design aesthetic with a focus on clean, responsive layouts and engaging content. Explore the different sections to learn more about my background, skills, and the projects I've worked on.
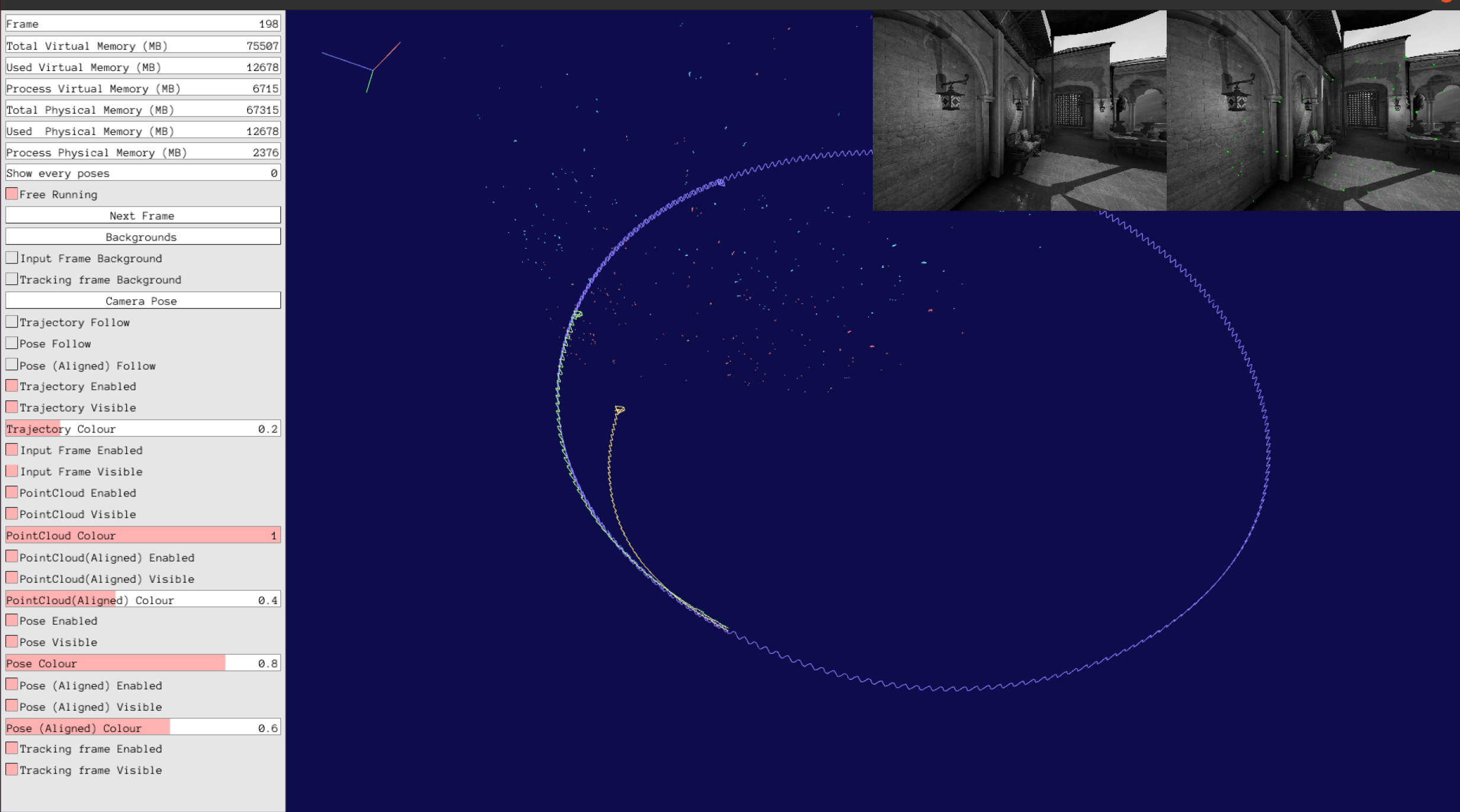
Integrated together a pipeline for evaluating ORB-SLAM 2 and ORB-SLAM 3 utilizing synthetic data.
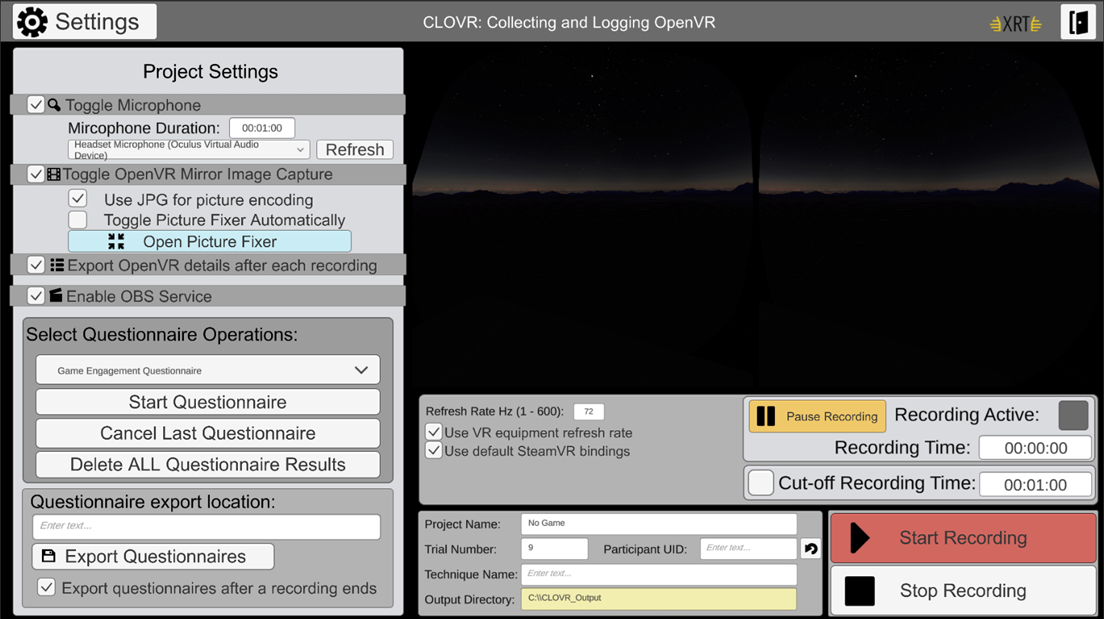
Created CLOVR to facilitate the capture of live data from a close-sourced VR application.
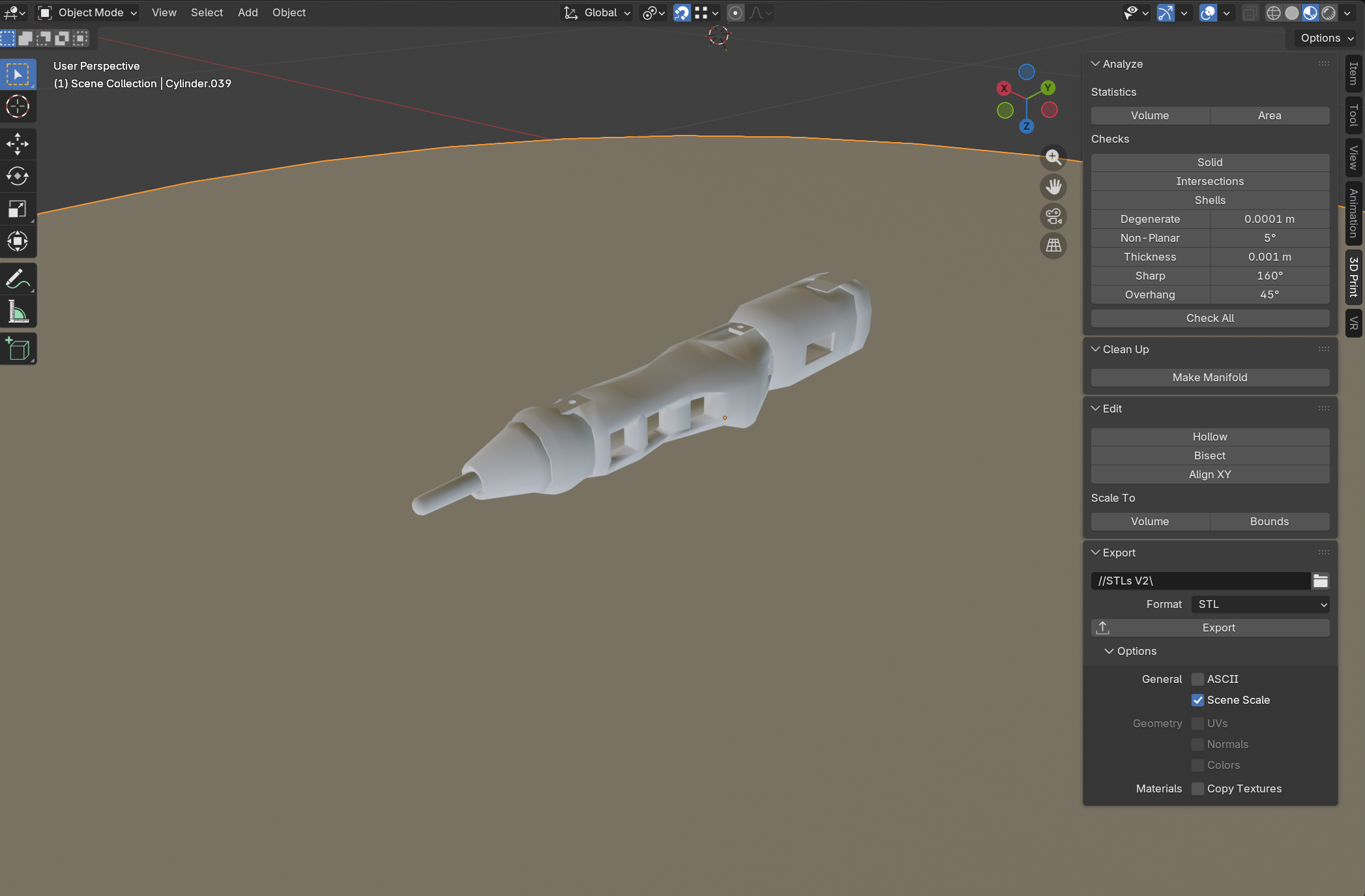
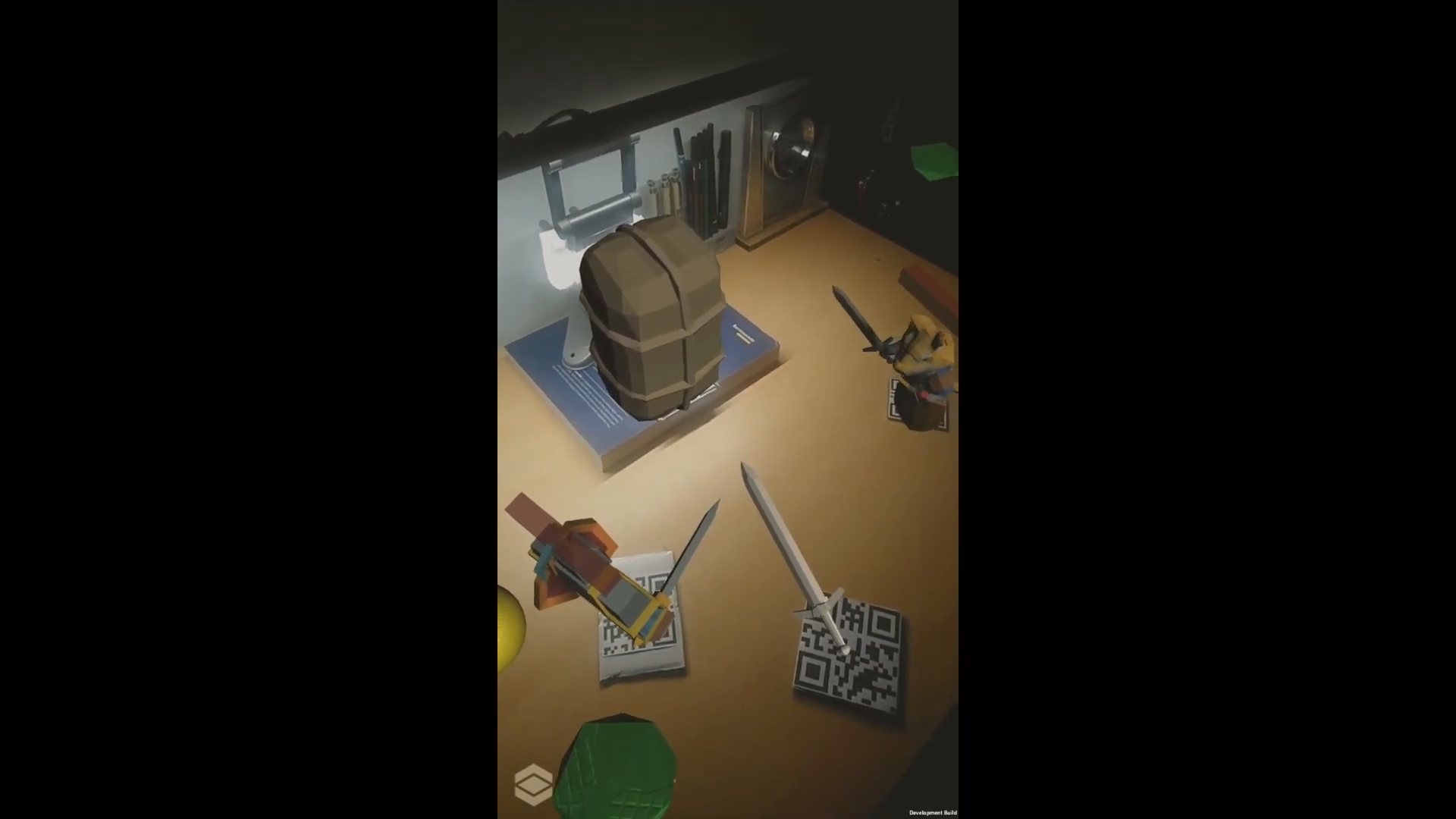
I am very profecient in 3D modeling and design by creating detailed models for various applications.
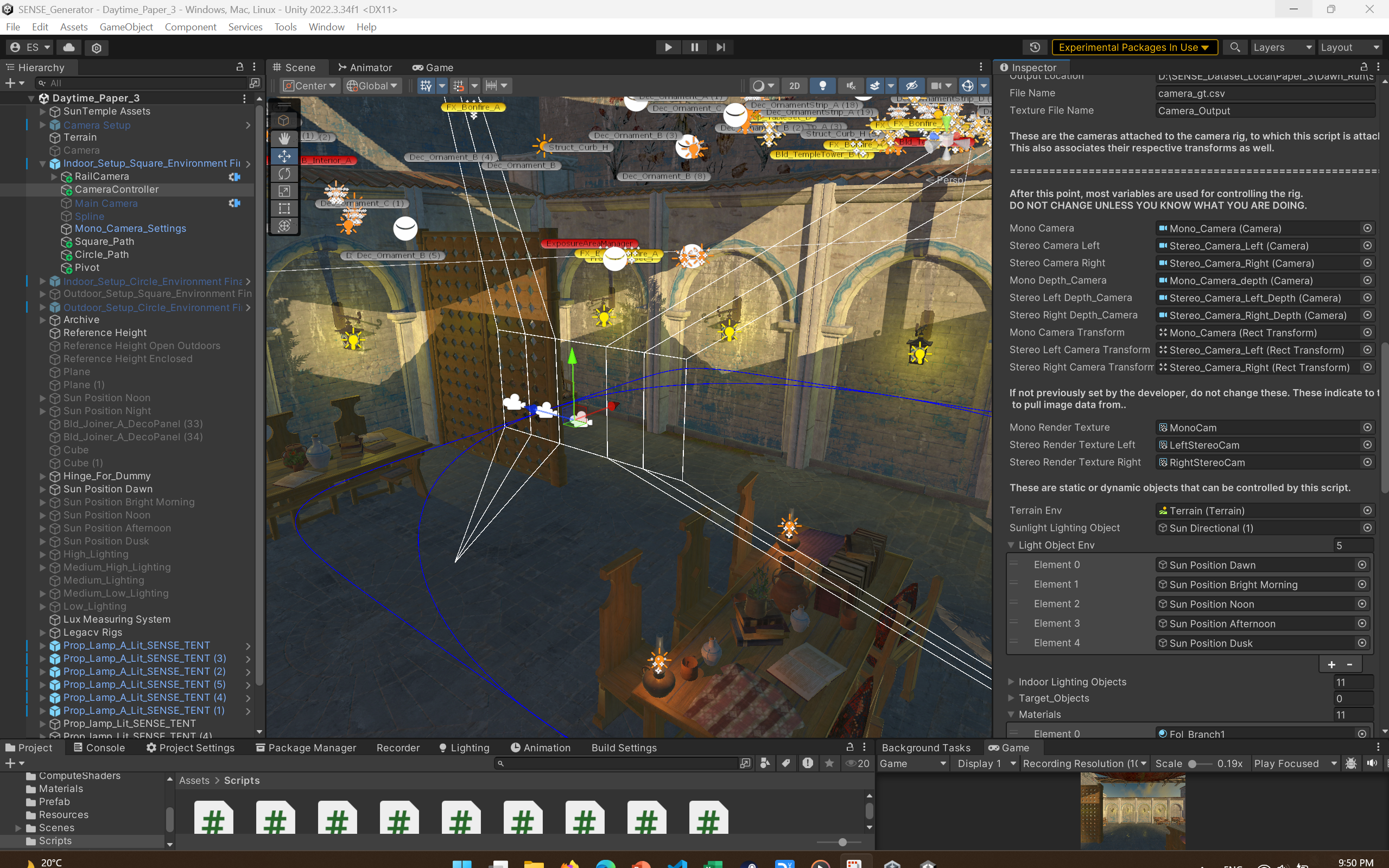
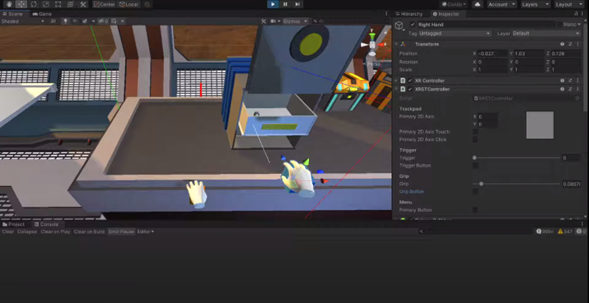
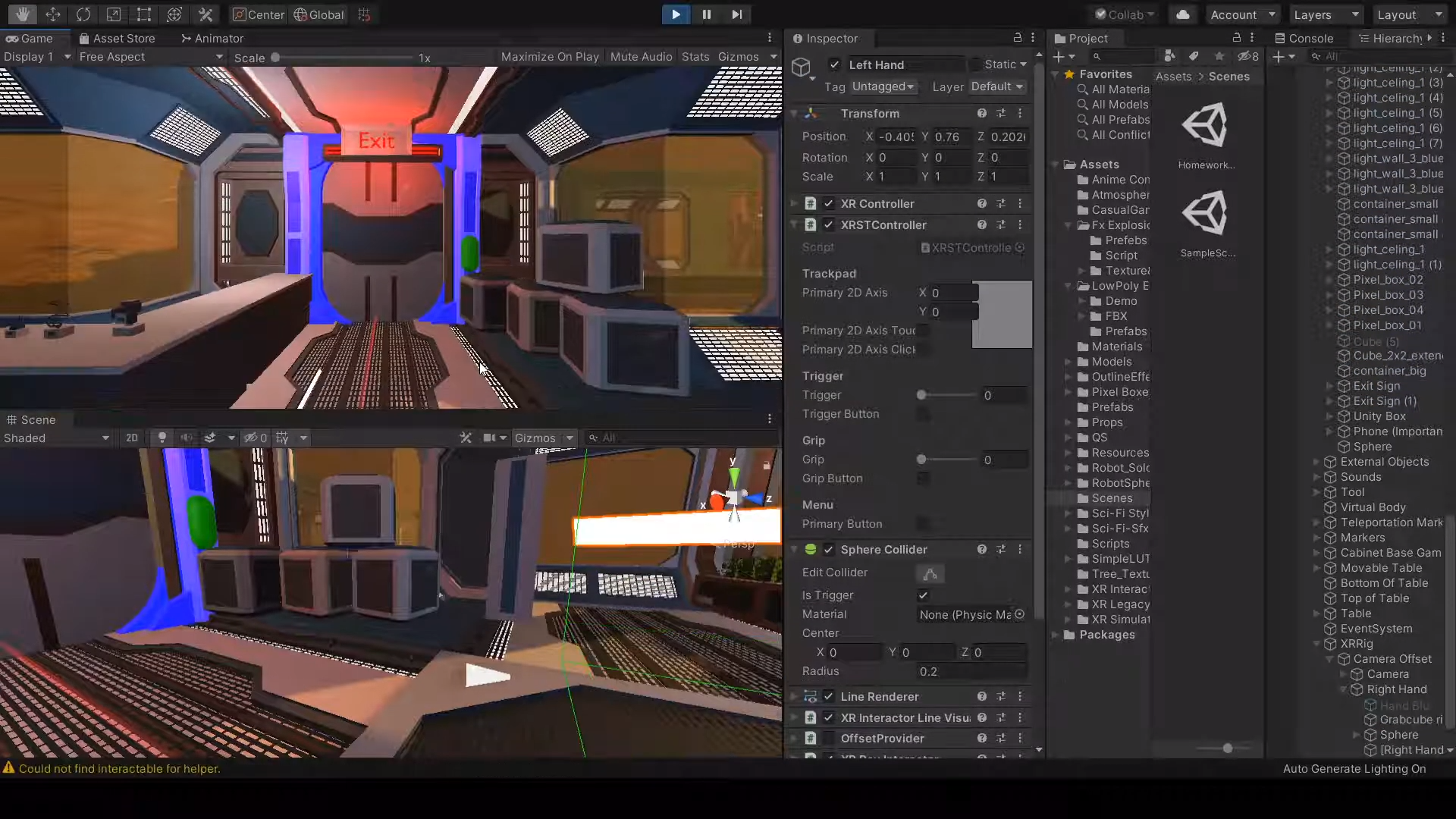
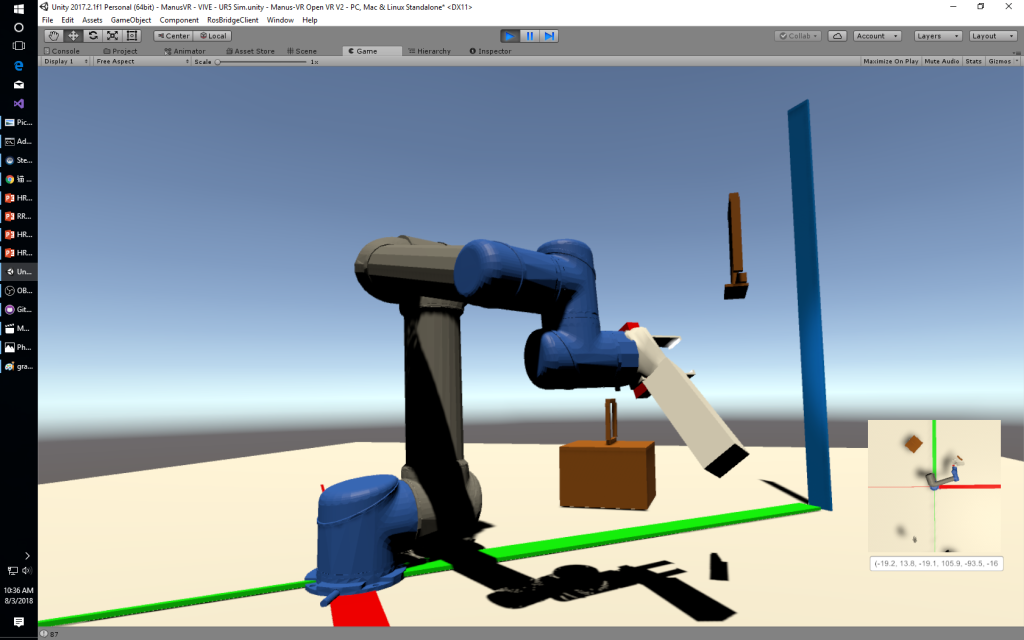
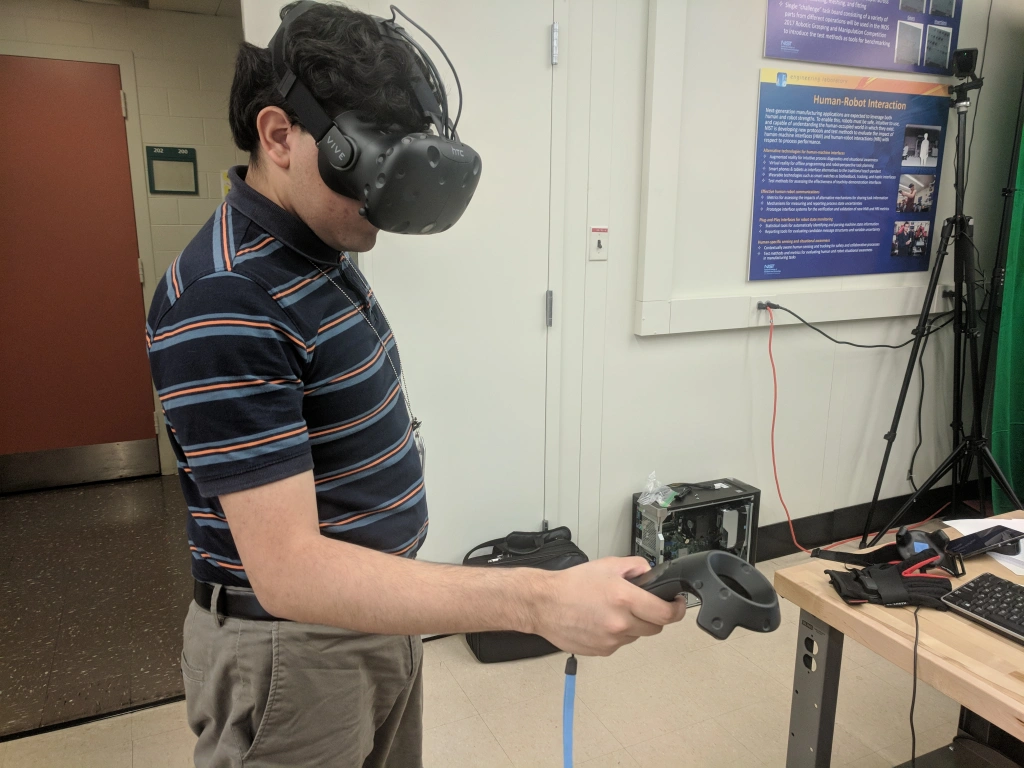
I have created VR experiences using Unity for testing and capturing data from a user.
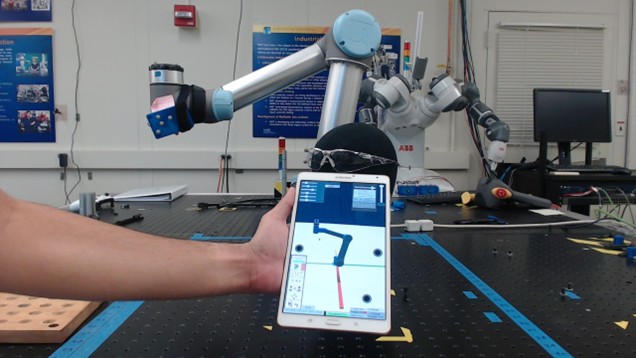
I have worked on integrating embedded systems for facilitating data collection, controlling devices, and in low-level architecture development.
Explore the navigation tabs above to see different sections of this portfolio website.
Some sample works with detailed descriptions of the related work.







Generally a generalist with a focus on exploring integration of features in 3D virtual spaces. These can include AI-related problems, virtual reality, embedded systems, or capturing information from the virtual environment. Always ready to engage with new challenges to learn and explore new technologies.
✓ PhD from the University of Central Florida
✓ Masters from the University of Central Florida
✓ Bachelors from Florida Polytechnic University
Featured projects and work samples demonstrating design and development capabilities.
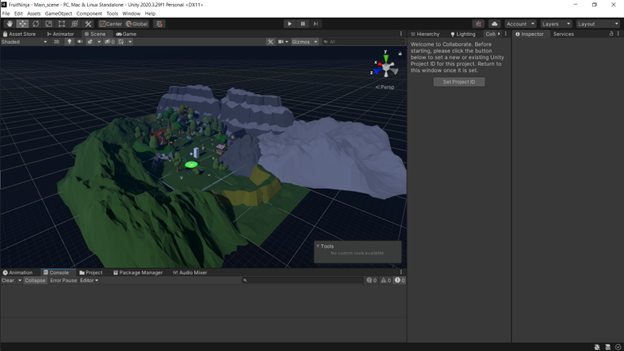
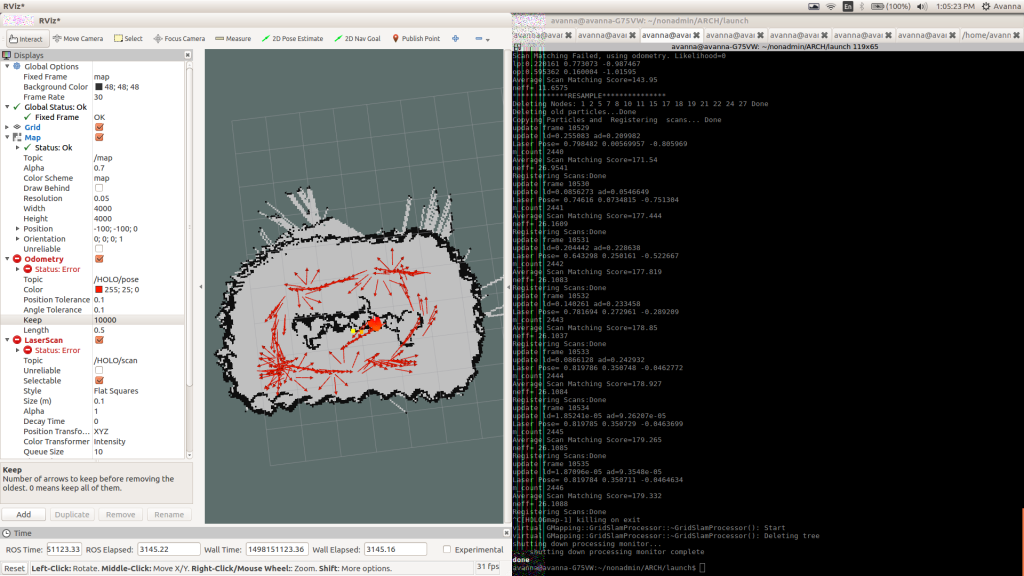
A SLAM Evaluation framework pipeline to create novel datasets with varying image properties. These can include different image physical property qualities such as image size, field of view, and visual distortions under different types of environments such as indoor, outdoor, and mixed environments. The framework is designed to be flexible and extensible, allowing for the addition of new datasets and evaluation metrics as needed. The goal of SENSE is to provide a comprehensive and standardized way to evaluate SLAM algorithms under a wide range of conditions, ultimately leading to improved performance and robustness in real-world applications.
The goal of CLOVR is to provide a side-running application that can be used to capture VR devices while running a propetary VR application. CLOVR can capture items such as the position and orientation of VR-connected devices as supported under the OpenVR API. This also allows the integration of other custom sensors as supported by OpenVR's framework. Additionally, CLOVR can capture the rendered images from the VR application and save them as video files through OBS integration. CLOVR is designed to be flexible and extensible, allowing for the addition of new features and support for different VR platforms as needed. The goal of CLOVR is to provide a comprehensive and standardized way to capture data from closed-source VR applications, ultimately leading to improved performance and robustness in real-world applications.
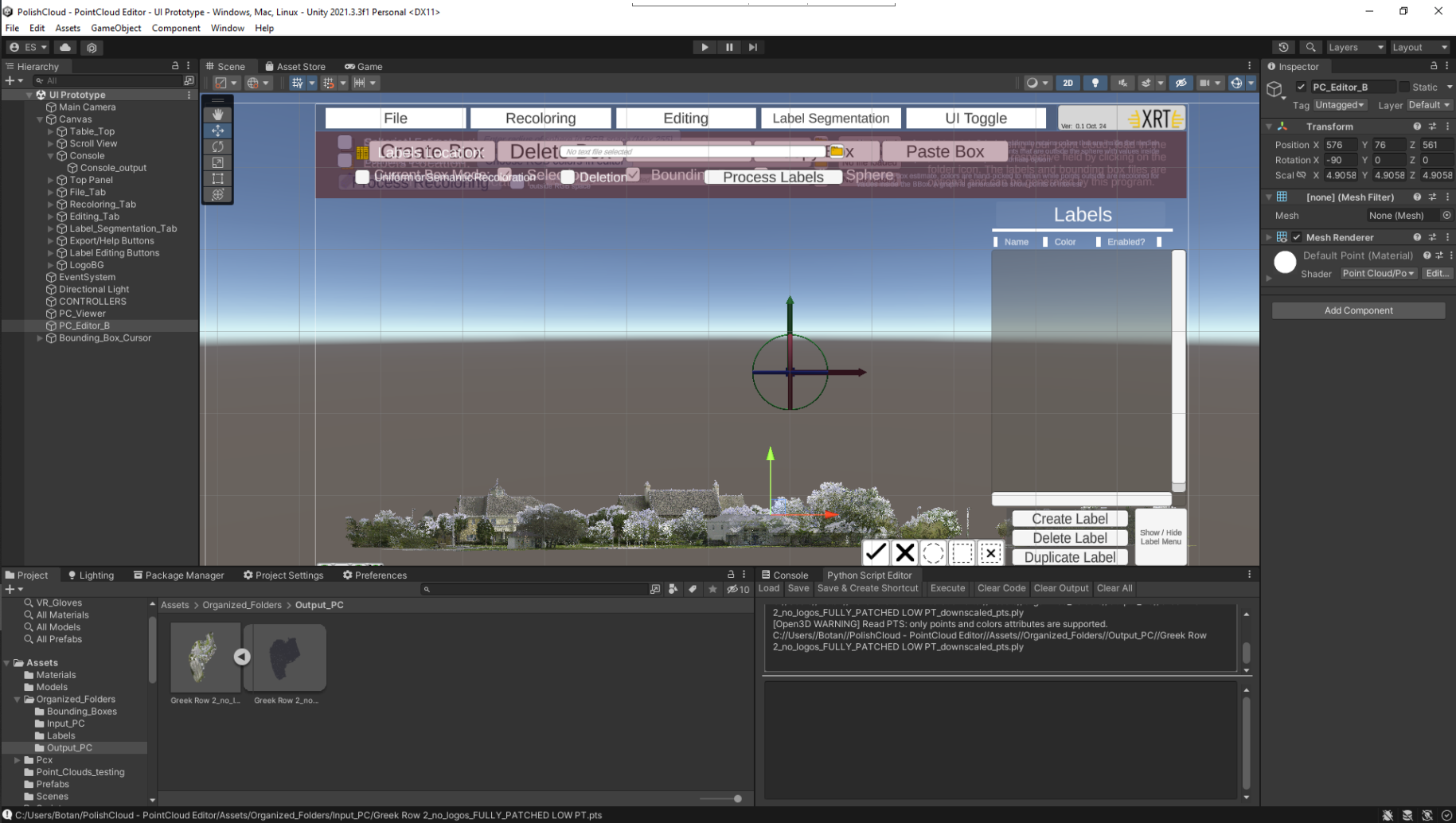
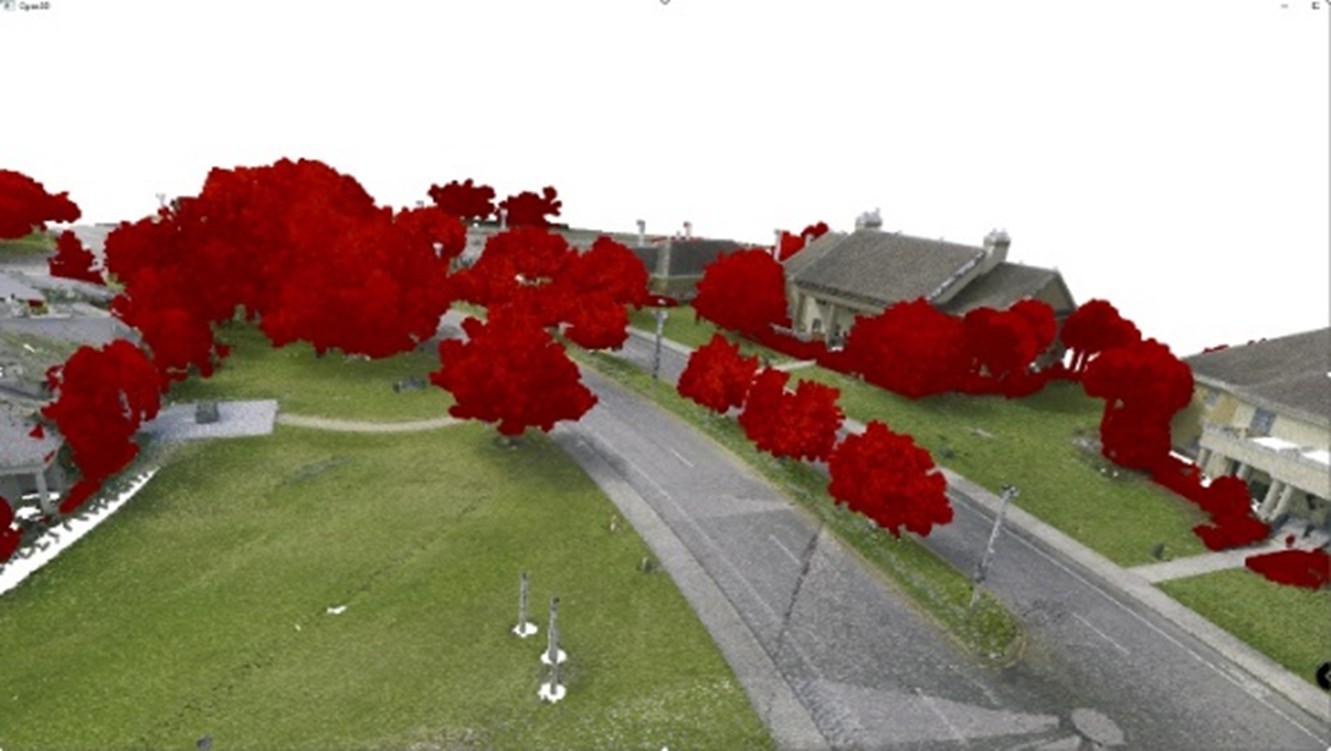
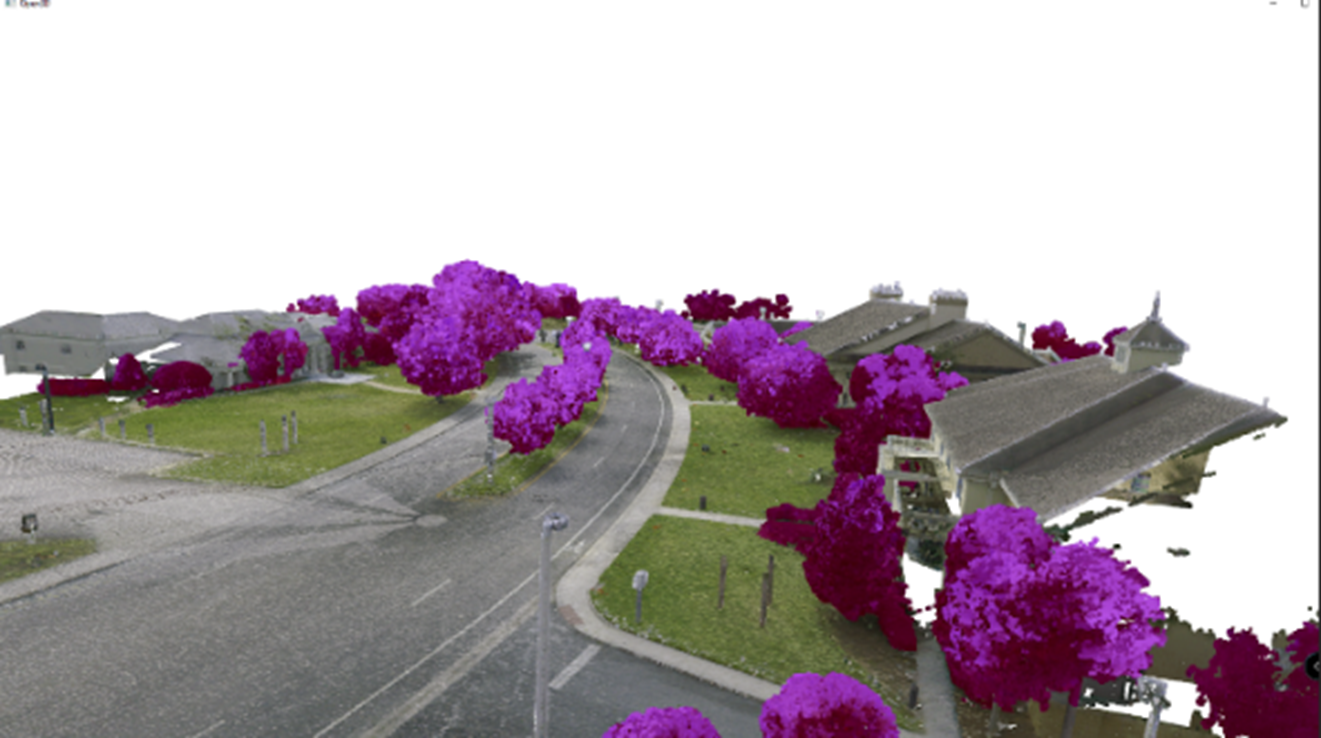
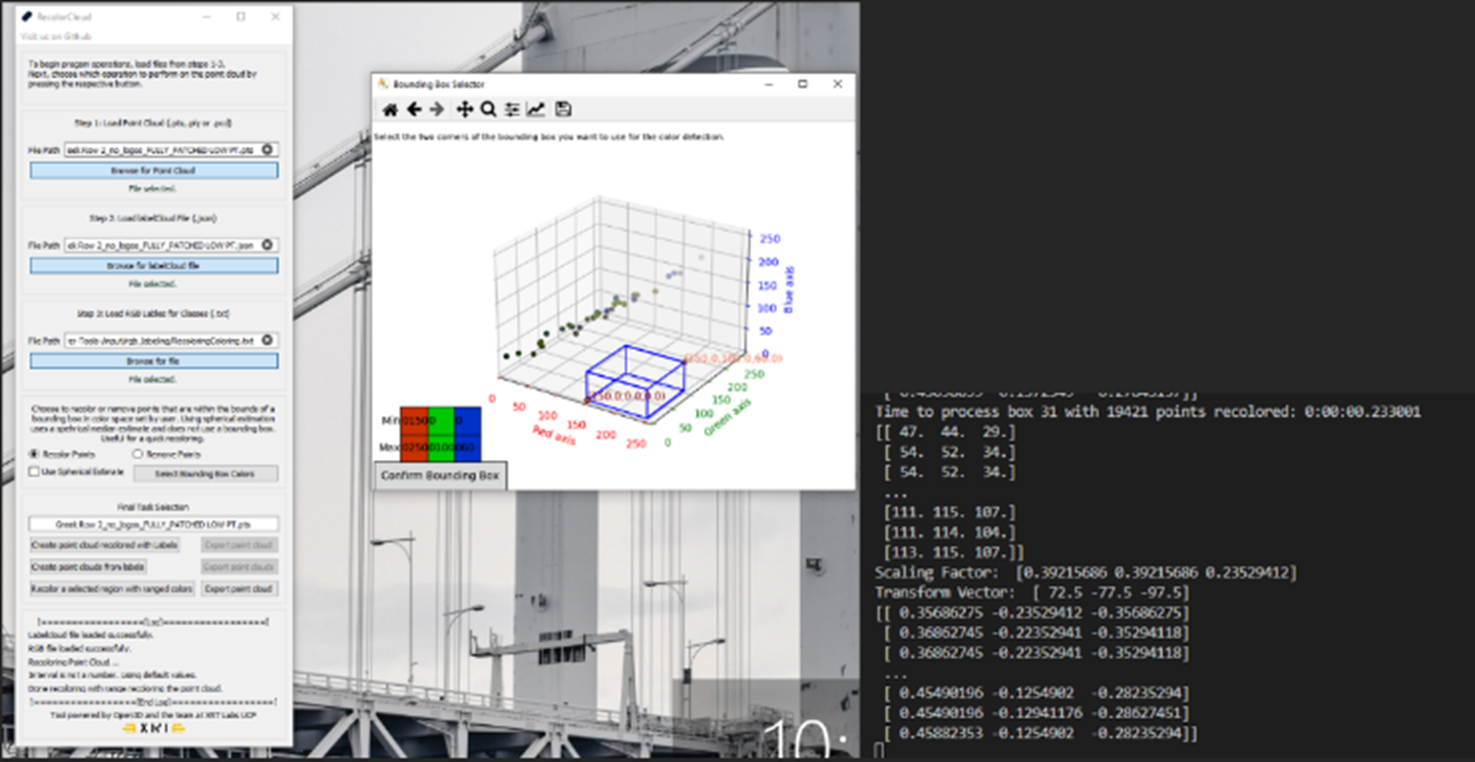
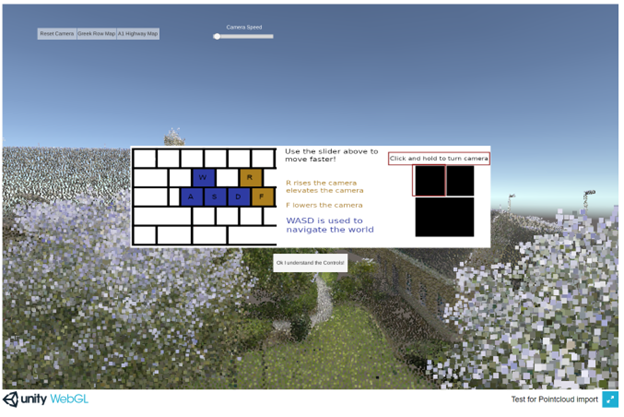
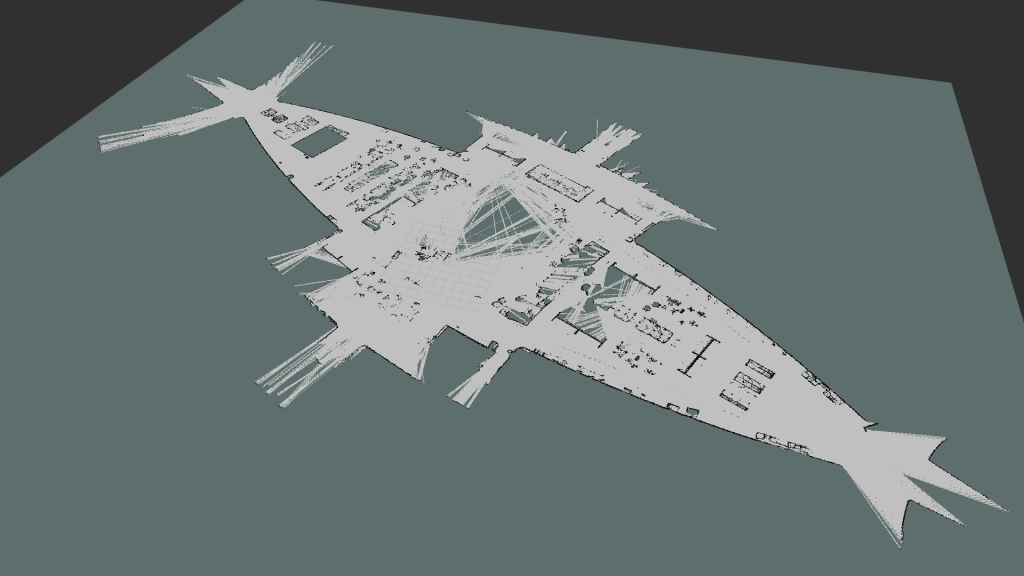
The goal of RecolorCloud is to provide an interface to recolor point clouds via 3D bounding boxes to improve their visual qualities. Often there is a difficulty in manually recoloring point clouds as the tooling for these is propietary or in limited capacity.